
Location-based services are becoming increasingly important in indoor environments with the development of Internet-of-thing (IoT). The visible light positioning (VLP) system offers great potential because of its immunity to radio frequency-induced electromagnetic interference, free and unrestricted spectrum, and a much higher level of security.
Recently, a lot of research work on line-of sight (LOS) VLP have been demonstrated with high accuracy at very low costs. However, for LOS VLP, blocking and shadowing is a major problem; and there is the requirement for large numbers of LEDs. Few methods to solve this problem have been investigated.
In a study published in Optics Express, Dr. LIN Bangjiang's group from the Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences proposed a non-line-of sight (NLOS) VLP system using a binocular camera and a single light-emitting diode (LED). It can realize 3D high-precision positioning of an arbitrary posture by the reflected lights from the floor.
The researchers proposed a system model which consists of two function modules: a NLOS optical camera communication (OCC) module and a binocular stereo vision module. The former uses the reflections to receive the coordinate information of the LED by an improved OCC signal recovery model. And the later estimates the camera's position by a proposed binocular position estimation algorithm, which is based on the principles of binocular stereo vision.
They then proposed an error compensation algorithm to optimize the error of the system on the z-axis, which is the key problem about depth estimation for the binocular camera that the error on the z-axis is far greater than that on the x and y axes.
Additionally, the researchers designed an experimental testbed and chose a STM32 microcontroller unit to driver a LED. At the receiver, they used a binocular camera to capture the reflected lights from the ground at two different exposure modes (one long and one short).
They gained the LED position by the NLOS OCC module using the short exposure image, and got the pixel coordinates of the projection of the LED reflected by the ground in the long exposure image. An inertial measurement unit is fixed together with the binocular camera to measure its pose.
By all these information, the researchers calculated the error between the estimation value and the measured value of the camera's position.
This study overcomes the challenge of the shadowing/blocking of the LOS links, realizes 3D arbitrary attitude positioning with the minimum number of beacons (only single LED), and greatly improves the practicability of VLP.
LIN Bangjiang
Fujian Institute of Research on the Structure of Matter
E-mail: linbangjiang@fjirsm.ac.cn
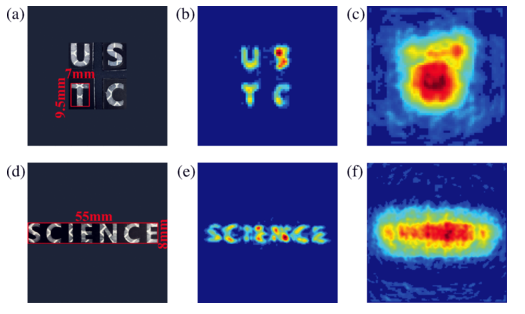
A research team led by Prof. PAN Jianwei from University of Science and Technology, in cooperation with researchers from the Jinan Institute of Quantum Technology, realized the millimeter-level three-dimension (3D) non-line-of-sight imaging by constructing up-conversion s...
Dr. LIN Bangjiang's group from Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences proposed a non-line-of sight (NLOS) VLP system based on a luminance distribution model for image sensor, which can realize 3D positioning by the refle...

86-10-68597521 (day)
86-10-68597289 (night)

52 Sanlihe Rd., Xicheng District,
Beijing, China (100864)
Copyright © 2002 - Chinese Academy of Sciences











